齿槽扭矩简介 - 伺服电机设计;利莱森玛 (Leroy-Somer) 科学总监雅克·圣米歇尔 (Jacques Saint-Michel) 在此解释了齿槽扭矩背后的理论。实现低且可重复的齿槽转矩值可能是设计和制造永磁电机时遇到的主要问题。
尽管有限元方法表明齿槽效应消除在理论上总是可能的,但如果仔细确定磁体的尺寸,实验结果往往会令人失望,有时甚至与目标相去甚远,以致某些电机不得不被拒绝。本文试图加深对这种情况的理解,并量化一些几何缺陷的影响。

1:齿槽的起源
显然,齿槽扭矩是由每个单独的磁体与每个单独的齿相互作用的综合影响产生的。为了分析这一点,我们将假设磁路是线性的(不饱和),这是空载时的合理假设,以允许使用叠加原理。
那么我们首先来看以下的情况:
¤ 所有定子齿均完全相同,且间距均匀。
¤ 转子上仅放置了一颗磁铁。
在这种特定情况下,很明显,转子上的磁体将在每个定子齿的前面具有稳定的位置。令 Ns 为定子齿数;则扭矩 T 可以写为:
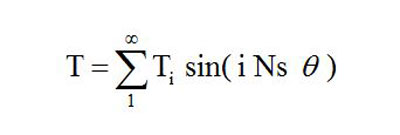
其中 ø 代表磁铁的位置。所有谐波,无论是奇数还是偶数,都可能存在,第一个谐波是迄今为止最大的谐波。
为了处理所有磁体,由于磁路已假设为线性,因此可以添加所有相应的贡献。令 Np 为极数;那么,如果磁体均匀分布且间隔为 ,则齿槽转矩由下式给出:
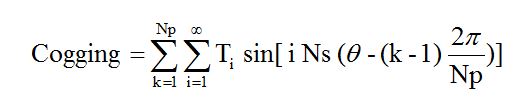
如果齿和磁铁都处于正确位置,则该通用表达式有效,可用于分析扭矩的频率分量。下文将通过几个例子来说明这一点。然而,为了更好地理解,更容易考虑矢量方法,这在电气工程中很常见。每个正弦分量被视为旋转矢量在固定轴上的投影,其角速度与其谐波阶次相关。
示例1:18齿6极机器:
将 Ns 替换为 18,将 Np 替换为 6,结果如下:
¤ 对于任何谐波阶次 Ti ,代表每个磁体贡献的矢量将移动 的倍数,然后相位一致,导致零序情况。
¤ 所有这些矢量将直接相加,总齿槽效应是所有磁体的所有贡献的总和。这显然是可能遇到的最坏情况,并且可以得出结论,对于这种机器,齿槽效应本质上非常高,因此绝对有必要进行偏斜。
示例2:21齿8极机器:
这里的情况就完全不同了,因为 21 和 8 没有共同的除法器。那么,对于大多数谐波次数,相应的空间向量形成一个平衡的多相系统(这里有8相),可以是正序,也可以是负序,其总和为零。因此,这些谐波阶次的总贡献消失了。
然而,某些谐波阶次会导致零序情况,所有向量将直接相加。与此相对应的最低频率顺序将在以下情况下出现:
当 i = 8 时,这显然会发生。然后,齿槽波形中的第一个频率将是机械速度的 21 x 8 = 168 倍,并且该贡献的幅度将由 8 x T8 给出。
由于谐波次数相当高,该幅度可能非常低。
示例3:12齿8极机器:
这里的情况在某种程度上与前面的情况类似,不同之处在于 12 和 8 有 4 作为公共除法器。因此,齿槽波形中的第一个频率将在以下情况下出现:
当 i = 2 时发生。齿槽波形中的第一个频率是机械速度的 12 x 2 = 24 倍,振幅现在是 8 x T2 。如果磁体没有仔细成形,则该幅度可能会相当高,但如果可以通过成形将 T2 最小化,则可以使该频率下的齿槽效应理论值变得非常低。
请记住,当电机的几何形状在数学上完美时,这种分析是有效的,但这在实践中当然是不可能的。然而,我们现在能够处理几何缺陷,例如一个磁铁或一个定子齿的错误位置。
2:磁铁位置的影响
我们可以很容易地遵循相同的过程,假设现在磁铁不是均匀分布的,也就是说,没有与另一个磁铁精确地移动 jsm7one 。
为了说明这一点,让我们再次以12齿8极电机为例,并考虑一次谐波次数T1的影响。
如果只有一个磁体不在其正确位置,则任意机械角度,对应于错误磁体的空间矢量将从其正确位置移动一定角度。这些矢量中的六个将完全相互补偿,因为它们交替地反相,并且它将仍然是具有相同幅度T1但有度数未对准的2个矢量的和。其结果由下式给出:
这是齿槽效应的幅度,频率为 Ns 乘以机械速度,即齿频率。该值可能非常大,因为 T1 是单磁体扭矩波形中的最大分量。
如果a为1°,则齿槽效应将高达0.21 T1,这可能非常大。
请注意,例如,对于直径为 25 mm 的转子,1° 对应于转子周边的 0.22 mm,这并不是一个非常大的几何缺陷。
产生的齿槽效应将处于齿通过频率。
3:齿不等距的影响
齿的不正确位置也可能是另一个重要问题,特别是对于分段结构,在组装过程中可能会出现一些不确定性。
为了观察这一点,我们可以遵循与第一段中开发的类似过程,不同之处在于我们现在假设所有磁体都存在于转子上并且均匀分布,并且定子只有一个齿。
单齿产生的扭矩可写为:
其中现在出现的是 Np 而不是 Ns,并且 Ti 值与之前的不同。
当所有齿都存在时,总扭矩现在为:

当牙齿分布均匀时。
可以进行类似的分析。如果一颗齿偏离其正确位置,则会在极点通过频率处出现残余扭矩。
其振幅由下式给出:
同样,这可能会导致非常不可接受的值。
总之,电机设计者当然需要仔细优化机器的几何形状,包括齿数、磁极数、磁体形状,以及可能的一些缓解手段,例如螺旋歪斜或阶梯歪斜。
但这还不够。设计人员还必须研究任何可能的几何缺陷或磁体强度分散等的敏感性......